By_ Cardo and C&I Team
Well, this is hard to explain how great our
feeling being trainees in this Power Plant – PT GH EMM INDONESIA. We’ve been
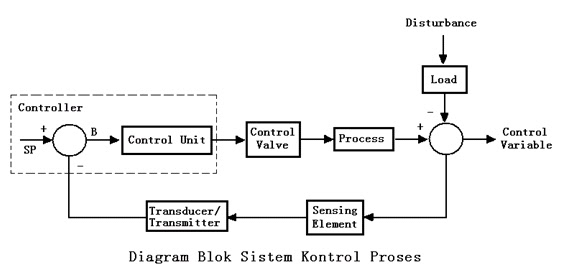
trained in Instrumentation and Control Department since September 19th
2016 to October 7th 2016, we have gotten so much things, beside of
knowledge from all instructors, include with many laughter, experiences
sharing, caring, and motivations, we do love to remind them all as sweet
memories. I&C Department, it’s been
always… Yeah, It’s been always be our favorite side wanna look to. May be,
supported by you Kak Kiki and Kak Ariyan as our Instructors. Yessss, you,, both
guys are good enough to be leader.


In another side, we really love live in the
living room, comfortable, enjoyable, and nice slumber inside. First impression
we arrived here is, “we love foods here” lol. We don’t know why, here has so
much nice foods. Better than Medan’s. Hahah. But, over all we really enjoy
training here.
Here
are our each impressions since being trainees in this Power Plant – PT GH EMM
INDONESIA.

DEBORASINAGA said; I really enjoy the workshop that has
provided the me as future Engineer with some excellent tools to help me manage
difficult situations – and how to have spoken to the team, you all found me the
eternal useful course and picked
me up some great ideas / tips / tools to help us deal with situations that
occur daily in our future working lives. I really enjoy so much things here, beside of learning, foods,
living room, are good enough to support training. Nice Tanjung Enim, LOVES…
Thank you Kak Kiki and Kak Ariyan, Thank you PT. GH EMM Indonesia.

TRI CARDO said; I
learnt so much that have been relevant and fun and can honestly say that 100%
of the workshop was useful and interesting. And you both, Instructors are the
true assets of the company. I love your training style and I can really saw
that you are expert of your side. Thank you for sharing, motivation, and
experiences shared to us. Doing the health
fitness, taking meals in canteen, safe living room (EVEN I GOT BAD INTERNET CONNECTION), they are fill my
fruitful days. Thank you PT PT. GH EMM Indonesia.

AGNESMARISTELLA
said; Thank you so much for the time spent with us. I am overwhelmed with the opportunities you
have given us and couldn’t be happier with the team’s engagement! I am really
optimistic about how different we can be in the future and wish we could press
the fast forward button now for all teams to be affected by the FIT team! I
know you guys are getting paid but it doesn’t stop me saying how I appreciate
what you are doing and the massive support it gives me…..so pleased you guys
were brought in! KIKI and ARIYAN, you guys really good, awesome. Thank you PT. GH EMM Indonesia, your canteen is so
highly good. I love you.

KIKI NUGRAHA said, I have learned so
much and it will contribute to make my
future job better and also gave me experiences of doing C&I job descriptions.
I have taken something away from everything we’ve covered, whether it’s
improving what I already do or trying something new – I was sincerely engrossed
in all of the training and I absolutely adore Kiki and Ariyan as my trainers!
Everything I expected from PT GH EMM Indonesia, excellent programs with fantastic trainers - I know my teams are
going to love it! Thank you.

ELIESERVALBORIS said; This was an excellent course that was motivational and
inspiring. It was good to see different approaches and new ways to train and
has given me lots of new ideas and skills to take back to the training room.
Good to be a delegate for a change! Excellent workshop – very upbeat and held
the attention of all delegates throughout. I personally learnt a lot, even
though I’ve been in the industry for some years. The whole team learnt some
very useful tools for the future that can be used in life to increase my success
in Control and Instrumentations system. Thank you PT GH EMM Indonesia.

DIMAS PRAYUDHA said; very
well presented and thought out training solution. PT GH EMM Indonesia has been very well and this was reflected in
the way the training was delivered to me as a C&I Trainee in MABAR POWER
STATION. Very bubbly and good trainers! Kept us engaged and interested. Good
morale boosting techniques shown to us and learnt very good C&I skills to
be used for our future job. Thank you
Trainers, Thank you PT. GH EMM Indonesia, Thank you Mabar Power Station.
It’s been so very great
deal for us that should say, “we enjoyed those all”. And we thankful for
everything that we have gotten here. Trainers who believed to train us, room
that given us, clean and tidy area, equipments,
tools, and everything that had let us to enrich us with knowledge that we will
use for our future job.
At last, we thankful to
you, the great Power Plant, PT GH EMM INDONESIA. May some day, will there be
any great MABAR POWER STATION with its great people inside. Thank You.
Bravo….!!!