1 Simple Control Loop (Basic
Control Loop)
Terdapat
dua macam konfigurasi looping dalam sistem kontrol proses. Konfigurasi ini
dibedakan berdasarkan bagaimana aksi kontroler dalam mengontrol process
variable. Kedua macam konfigurasi tersebut adalah sistem kontrol feedback dan
sistem kontrol feed forward.
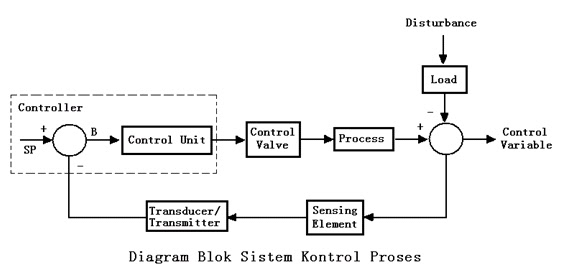
a. Closed Loop Control –
Feedback
Feedback
control adalah suatu sistem pengontrolan dimana control action tergantung pada
output proses. Tipe sistem kontrol ini mengukur process variable pada output
proses. Setiap terjadi perubahan pengukuran pada outlet proses akibat adanya
efek dari disturbances (load), maka sistem kontrol feedback bereaksi memberikan
corrective action untuk menghilangkan kesalahan (error).
Jadi sistem control feedback akan bereaksi setelah
efek dari disturbances dirasakan pada output proses (act post facto). Gambar dibawah
merupakan contoh dari tipe sistem kontrol feedback dalam aplikasinya yaitu
furnace pada industri PLTU.

b. Closed Loop Control – Feedforward
Tidak seperti konfigurasi feedback, kontrol
feedforward tidak menunggu efek disturbances dirasakan oleh proses, sebaliknya
akan beraksi sebelum disturbances mempengaruhi sistem untuk mengantisipasi efek
yang akan disebabkan olehnya.
Pada feedforward control seperti pada
gambar dibawah ini, setiap terjadi perubahan pada feed inlet, maka akan
menggerakkan controller untuk mengatur fuel oil sehingga aliran feed akan
sebanding dengan aliran fuel oil (menciptakan energy balance). Dengan demikian
efek yang disebabkan oleh perubahan feed tidak dirasakan pada output proses
(temperatur outlet). Kelemahan feedforward control pada aplikasi di atas yaitu
bila terjadi gangguan pada fuel oil, maka controller tidak dapat merasakan
perubahan itu sehingga terjadi kesalahan pada output proses (temperatur
outlet).

2. Complicated Control Loop
(Enhanced Regulatory Control)
Di dalam
industri proses, banyak kebutuhan proses yang tidak dapat diselesaikan dengan
loop sederhana (simple loop) yang hanya mengandalkan sebuah feedback control
atau feedforward control. Beberapa jenis proses yang memiliki time constant
yang sangat besar. Walaupun unit derivative sudah dipasang di controller, karena
lambannya proses sehingga reaksi proses tetap saja lambat. Dari segi operasi
proses kelambatan ini sangat merugikan. Untuk mengatasi masalah ini, maka dipergunakan
dua atau lebih elemen pengukuran dalam satu control loop, yang dikenal sebagai
complicated control loop, seperti:
a. Cascade Control
closed
loop feedback control mengilustrasikan pengendalian temperatur feed outlet pada
sebuah furnace. Load pada loop digambarkan sebagai perubahan aliran feed pada
inlet. Bilamana feed mendadak bertambah, maka energi panas fuel oil yang
bekerja pada furnace tidak akan mencukupi. Sebagai akibatnya, temperatur feed
outlet akan turun dan controller baru membaca error, kemudian memakainya sebagai
dasar perhitungan untuk menambah aliran fuel oil. Namun sistem ini tidak
mempertimbangkan load atau gangguan lain pada sistem, yaitu terjadi penurunan
tekanan fuel oil. Pada sistem ini pengendalian temperatur tidak akan segera
melihat perubahan tekanan fuel oil sebelum temperatur feed outlet benar-benar
turun.
Untuk
mengatasi permasalahan tersebut , maka sistem control disempurnakan dengan
menambah Pressure Controller diantara Temperature Controller dan Control Valve
seperti pada gambar berikut.

Pada gambar diatas manipulated variable dari temperature
controller TIC (yang dinamakan primary atau master) menjadi setpoint bagi
pressure controller (yang dinamakan secondary atau slave). Penerapan
pengendalian cascade dapat merugikan apabila elemen proses di primary loop
lebih cepat dari elemen proses pada secondary loop, karena sistem akan cederung
berosilasi akibat timbulnya interaksi antara primary loop dan secondary loop.
Jadi sistem pengendalian cascade hanya dapat diterapkan pada proses dengan
elemen primer yang jauh lebih lambat dari elemen secondary-nya.
b. Splite Range Control
Tidak
seperti cascade control, konfigurasi split-range control memiliki hanya satu pengukuran
dan lebih dari satu manipulated variable. Pengendalian terhadap satu process
variable dilakukan dengan mengkoordinasikan beberapa manipulated variables yang
semuanya memiliki efek yang sama terhadap process variable.
Gambar di
bawah mengilustrasikan aplikasi split-range control di industri proses.
Konfigurasi ini dapat memberikan keamanan tambahan dan optimalitas operasional
jika diperlukan.

Misalkan,
suatu feed akan dipanaskan di dalam suatu furnace dengan menggunakan bahan
bakar (fuel). Temperatur feed di outlet bejana dipertahankan tetap pada suhu
tertentu. Bahan bakar yang tersedia ada dua jenis yaitu, fuel oil sebagai bahan
bakar utama dan fuel gas digunakan sebagai balance. Kontroler temperatur
split-range akan menjaga temperatur outlet dengan memanipulasi bukaan valve
pada kedua bahan bakar. Dengan konfigurasi ini dapat diatur aksi kontrol
sebagai berikut :
-
Sebagaimana
output controler TIC meningkat dari 0 – 50 %, maka control valve V1 (untuk fuel oil) akan membuka secara
kontinu hingga bukaan penuh, sedangkan control valve V2 (untuk fuel gas) tetap
tertutup.
-
Apabila
output kontroler TIC masih naik, dari 50 – 100%, maka control valve V2 akan
membuka secara kontinu sampai bukaan penuh, sedangkan valve V1 masih tetap
terbuka penuh. Dengan demikian fuel gas digunakan sebagai balance apabila fuel
oil masih tidak cukup untuk menaikkan temperatur output.
Tabel berikut ini mengilustrasikan cara
kerja kontroler Split Range Control.
|
Output
Controler TIC
|
Control
Valve V1
|
Control
Valve V2
|
|
0 – 50%
(50 – 0%)
|
Membuka (menutup) secara kontinu hingga
maksimum (minimum)
|
Tertutup
|
|
50 – 100%
(100 – 50%)
|
Terbuka
|
Membuka (menutup) secara kontinu hingga
maksimum (minimum)
|
c. Ratio Control
Ratio
control adalah sistem pengendalian yang digunakan pada suatu proses yang membutuhkan
komposisi campuran dua komponen atau lebih dengan suatu perbandingan tertentu.
Ratio control juga merupakan suatu tipe khusus dari feedforward control dengan
dua disturbances (loads) diukur dan dijaga pada perbandingan yang konstan satu sama
lain.
Biasanya
konfigurasi kontrol ini digunakan untuk mengendalikan perbandingan laju aliran
dari dua aliran (streams). Salah satu aliran (stream) yang laju alirannya tidak
dikontrol biasanya mengacu sebagai wild stream. Berikut ini salah satu contoh
sistem pengendalian proses yang menggunakan konfigurasi ratio control.

Kedua laju aliran tersebut diukur dan melalui divider
perbandingan keduanya dihitung. Hasil perbandingan ini kemudian dibandingkan
dengan perbandingan yang diinginkan (desired ratio sebagai setpoint), dan error
antara perbandingan yang terukur dengan setpoint menghasilkan sinyal aktuasi
sebagai kontroler ratio.
d. Auto Selector Control
Sistem
kontrol ini melibatkan satu manipulated variable (MV) dan beberapa controlled
ouputs. Karena hanya ada satu manipulated variable, maka hanya satu controlled
outputs yang dapat dikendalikan, auto selector control akan mentransfer aksi
kontrol dari satu controlled output
Gambar berikut mengilustrasikan suatu konfigurasi auto
selector control sebagai suatu low selector switch.

Sistem digunakan untuk memanaskan air yang mengalir ke
dalam boiler. Suatu control loop tekanan diaplikasikan pada steam yang keluar
dari boiler. Selain itu, kontroler level juga diaplikasikan pada boiler. Low
level selector akan memindahkan aksi kontrol dari kontroler tekanan PIC ke
kontroler level LIC apabila level water di boiler berada di bawah batas level
minimalnya.